著名科学家费曼在1959年作了一次题为《在底部还有很大空间》的演讲,对未来纳米技术的发展起到重要的影响。微型机器人是纳米技术的一个重要分支。它与常规机器人虽然在组成、结构和应用方面有所不同,但从机器人的定义上来看,它们具有一定的共性,即作为半自主或全自动机器,它们具有感知、决策等基本特征。可以辅助甚至替代人类高效完成危险、艰巨、复杂的工作,拓展人类活动和能力的范围。微型机器人在生物医学和环境修复方面具有巨大应用潜力。然而,小型机器人的运动与传统宏观大尺度机器人的运动有所不同,因为小尺寸效应(scaling law),运动和驱动变得困难。随着机器人的特征尺寸从宏观尺度减小到微纳米尺度,与粘附力和摩擦力的影响相比,重力的影响变得可以忽略不计。
在自然界中,各种物种都可以通过合理设计表面结构和成分来降低阻力。例如,水黾被称为池塘滑行者,是由于它们腿部的定向微刚毛可以捕获大量空气,实现在水上自由站立和滑行。鲨鱼尽管体型庞大,但移动灵活而迅速,因为它们皮肤上紧密排列的真皮细齿平行于水的局部流动方向,有助减少水阻力。蚯蚓在土壤中蠕动而不会伤害其表面组织,因为它们表面动态分泌的粘液减少了运动摩擦。因此,表面改性和结构化是减少微型机器人与其周围环境之间的表面粘附和摩擦的重要手段。它也可以增加机器人表面的液体滑移,从而提高微型机器人的移动性。近年来,研究人员开发了从单个机器人到机器人群的一系列微型机器人,得益于合理的表面设计和功能化(图 1),使得微型机器人在高粘度体内环境可控递送和泥状污水修复方面具有广泛前景。
近日,beat365体育官网平台王奔博士,周学昌教授,香港中文大学张立教授,湖北大学郭志光教授,布尔诺理工大学Martin Pumera教授,中科院兰州化学物理所刘维民院士,在《Advanced Materials》上发表了题为“Small-scale robotics with tailored wettability”的综述,在综述中,总结了微型机器人疏水和亲水表面改性的作用和特点(图2),用以全面了解通过合理的表面设计和功能化,特别是在粘性流体中提高微型机器人的机动性和阻力最小化。该综述也总结了表面润湿、减阻和机器人运动背后的基本理论。回顾和比较了基于微型机器人的亲水和疏水改性的应用。为了满足实际应用的需求,微型机器人应能以可控的方式绕过各种粘性液体和生物屏障,而不能仅停留在稀释的低粘度和静止流体环境下进行概念验证。随着不断创新,合理的表面工程有望赋予小型机器人更好的的运动性和功能性,包括最大限度地减少运动阻力,减少表面的生物污染,提高生物相容性和伪装能力,从而拓宽其应用范围、增强其穿透深度和提高工作效能。
(图片源于Advanced Materials网站)
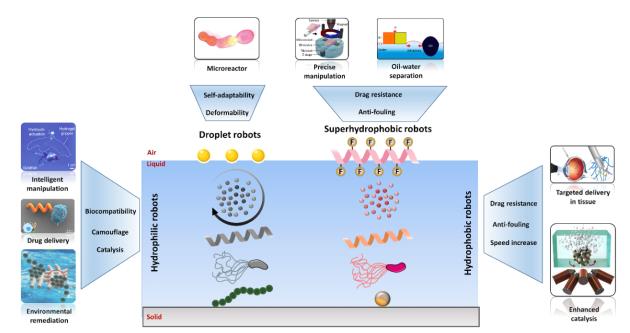
图1.有缆和无缆小型机器人通过各种亲疏水表面功能化,实现不同的功能和应用
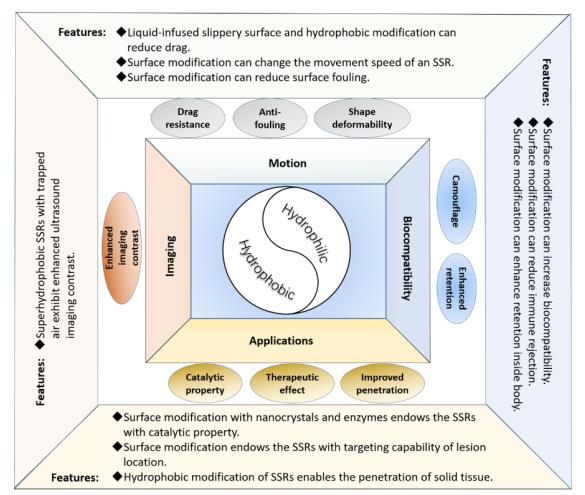
图2.从驱动、成像、生物相容性和应用等方面总结微型机器人表面疏水性和亲水性改性的作用和特点



